Publications
2025
-
 IRouterLM - Adaptive Query Routing for Multimodal RAGEmre Kuru and Mehmet Onur KeskinSubmitted for conference review2025
IRouterLM - Adaptive Query Routing for Multimodal RAGEmre Kuru and Mehmet Onur KeskinSubmitted for conference review2025 - SIGIR WS 2025
 Emre Kuru and Mehmet Onur KeskinIn 48th International ACM SIGIR Conference on Research and Development in Information Retrieval, Workshop on Information Retrieval’s Role in RAG SystemsNov 2025
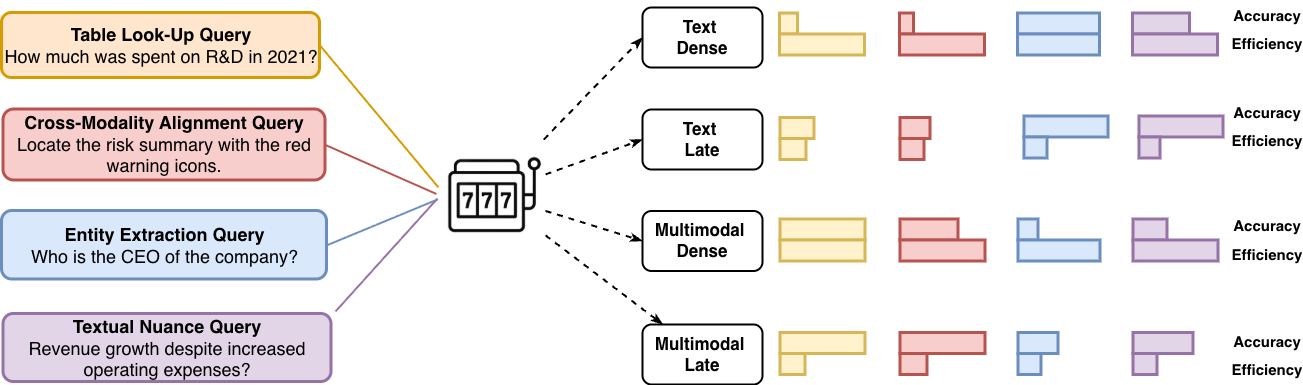
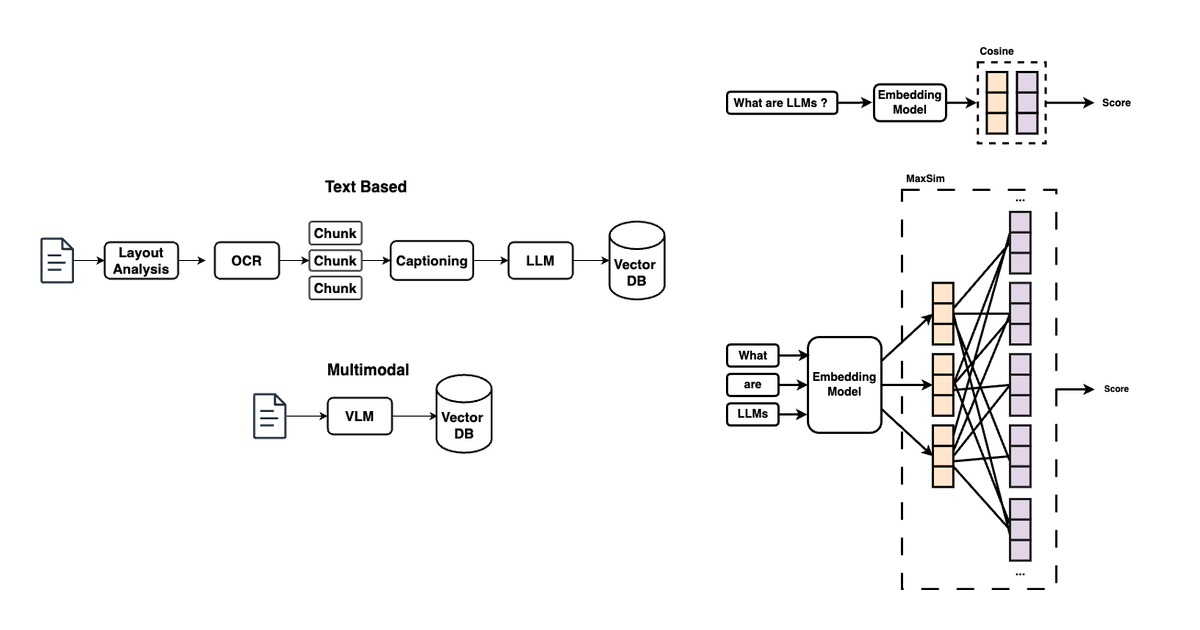
Emre Kuru and Mehmet Onur KeskinIn 48th International ACM SIGIR Conference on Research and Development in Information Retrieval, Workshop on Information Retrieval’s Role in RAG SystemsNov 2025Retrieval-augmented generation (RAG) systems traditionally rely on text-based pipelines to extract and retrieve information from documents. While efficient, these systems often struggle with documents where meaning is conveyed through layout, tables, and visual elements. Recent advancements in multimodal pipelines, utilizing advanced vision-language models (VLMs), have significantly improved retrieval quality by jointly encoding visual and textual signals. However, these improvements come with increased memory requirements and higher indexing and retrieval latency. To address these trade-offs, a quantitative, data-driven methodology is proposed for selecting the most suitable RAG pipeline based on empirical performance and resource constraints. This involves evaluating leading contemporary textual and multimodal pipelines, including dense and late-interaction architectures, to analyze their strengths, limitations, and the types of documents they are best equipped to handle. The evaluation focuses on key design dimensions in modern RAG systems: input modality (textual vs. visual) and retrieval architecture (dense vs. late interaction). The study highlights that text-based pipelines typically follow a multi-stage preprocessing procedure, and while efficient, they can lose fine-grained alignment crucial for structured or layout-dependent documents. Multimodal approaches, on the other hand, preserve token-level or patch-level granularity during indexing. The goal is to guide practitioners in identifying the most efficient and accurate pipeline for specific tasks.
@inproceedings{kuru2025evaluating, month = nov, booktitle = {48th International ACM SIGIR Conference on Research and Development in Information Retrieval, Workshop on Information Retrieval's Role in RAG Systems}, pid = {14}, author = {Kuru, Emre and Keskin, Mehmet Onur}, year = {2025}, pages = {}, title = {Evaluating Modern RAG: Textual, Multimodal, Dense, and Late Interaction Pipelines}, doi = {10.13140/RG.2.2.24324.18561} } - IVA 2025
 Mehmet Onur Keskin, Umut Çakan, and Reyhan AydoğanIn 25th ACM International Conference on Intelligent Virtual Agents,Oct 2025
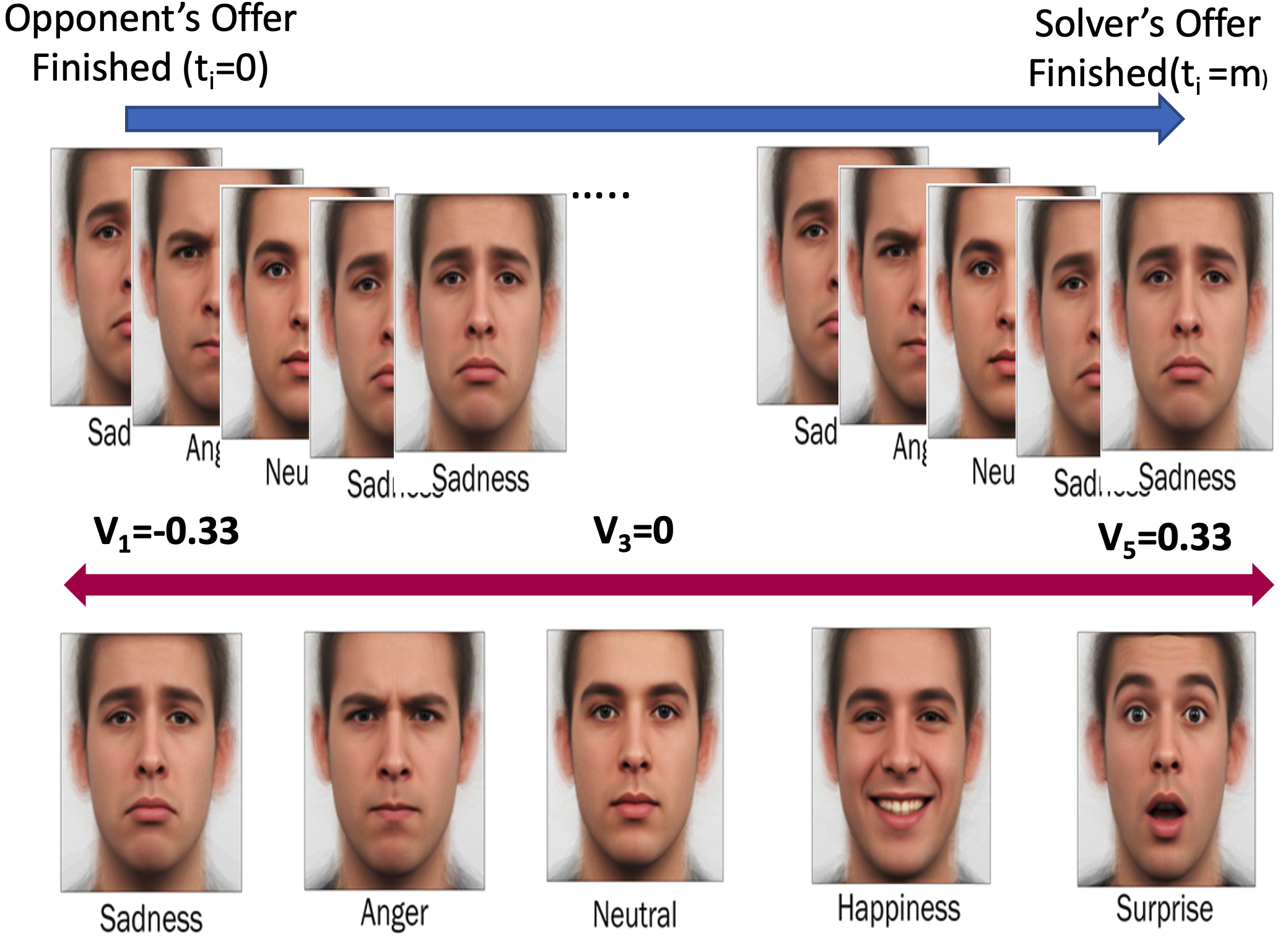
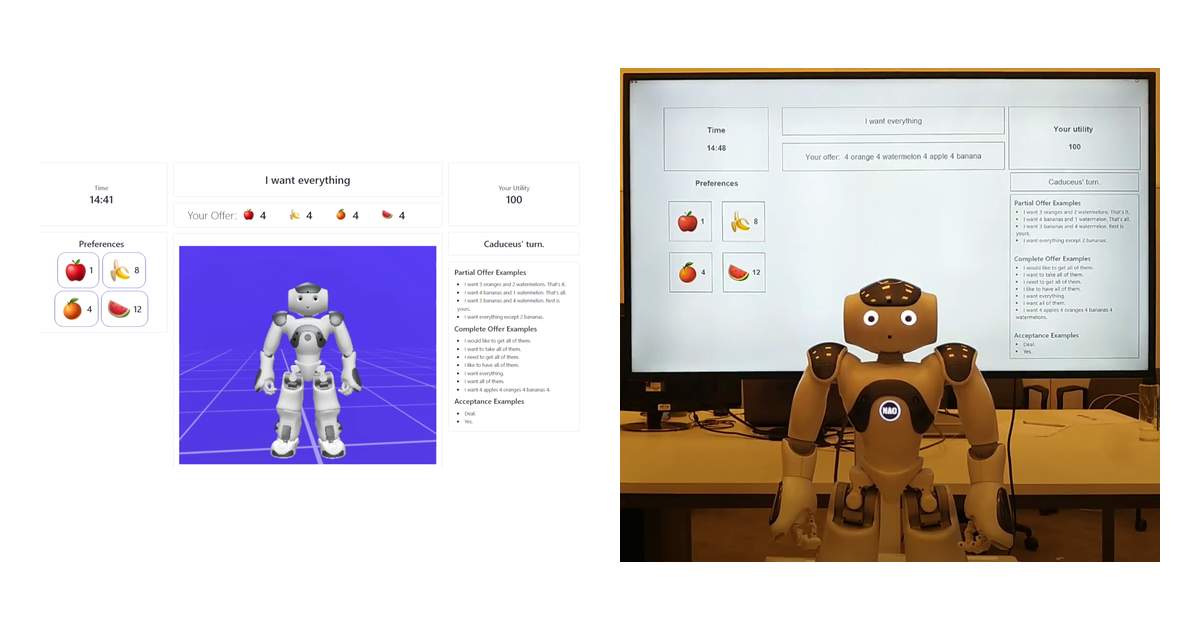
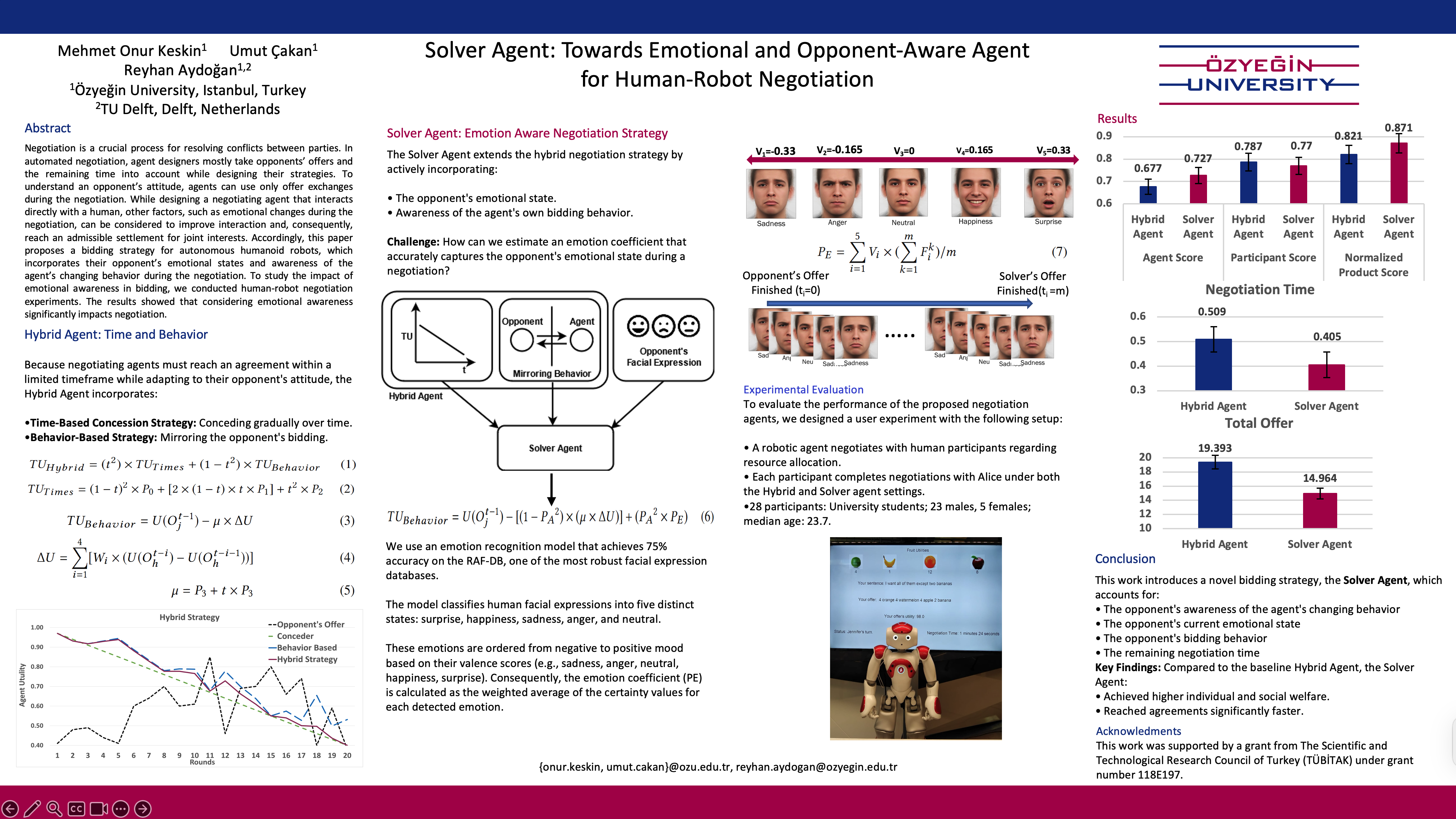
Mehmet Onur Keskin, Umut Çakan, and Reyhan AydoğanIn 25th ACM International Conference on Intelligent Virtual Agents,Oct 2025Negotiation is pivotal for conflict resolution in human-agent interactions, where emotional and behavioral dynamics can significantly shape the outcomes. However, many existing strategies prioritize time- or behavior-based tactics and overlook the dynamic role of emotional awareness. This paper presents the Solver Agent, which integrates real-time facial expression recognition into a hybrid strategy incorporating time- and behavior-based approaches. It is deployed on a humanoid robot with multimodal interaction capabilities (speech, gestures, facial expression analysis) to dynamically refine its bidding and concession strategies based on an opponent’s emotional cues and negotiation patterns. In user studies with 28 participants, the Solver Agent achieved higher agent scores, improved social welfare, and faster agreements than a baseline hybrid strategy without compromising participant satisfaction. Participants also viewed the Solver Agent as more attuned to their preferences and goals. These findings highlight that embodied emotion-aware negotiation can foster equitable and efficient collaboration, pointing to new opportunities in human-agent interaction research.
@inproceedings{10.1145/3717511.3747087, month = oct, booktitle = {25th ACM International Conference on Intelligent Virtual Agents}, pid = {13}, author = {Keskin, Mehmet Onur and \c{C}akan, Umut and Aydo\u{g}an, Reyhan}, title = {An Adaptive Emotion-Aware Strategy for Human-Agent Negotiation: Insights from Real-World Human-Robot Experiments}, year = {2025}, isbn = {9798400715082}, publisher = {Association for Computing Machinery}, address = {New York, NY, USA}, url = {https://doi.org/10.1145/3717511.3747087}, doi = {10.1145/3717511.3747087}, articleno = {29}, numpages = {9}, keywords = {Human-Agent Negotiation, Emotion, Negotiation Strategy, Human-Robot Interaction}, location = { }, series = {IVA '25} } - ACM TIIS 2025
 Anıl Doğru, Mehmet Onur Keskin, and Reyhan AydoğanACM Transaction on Interactive Intelligent SystemsMar 2025
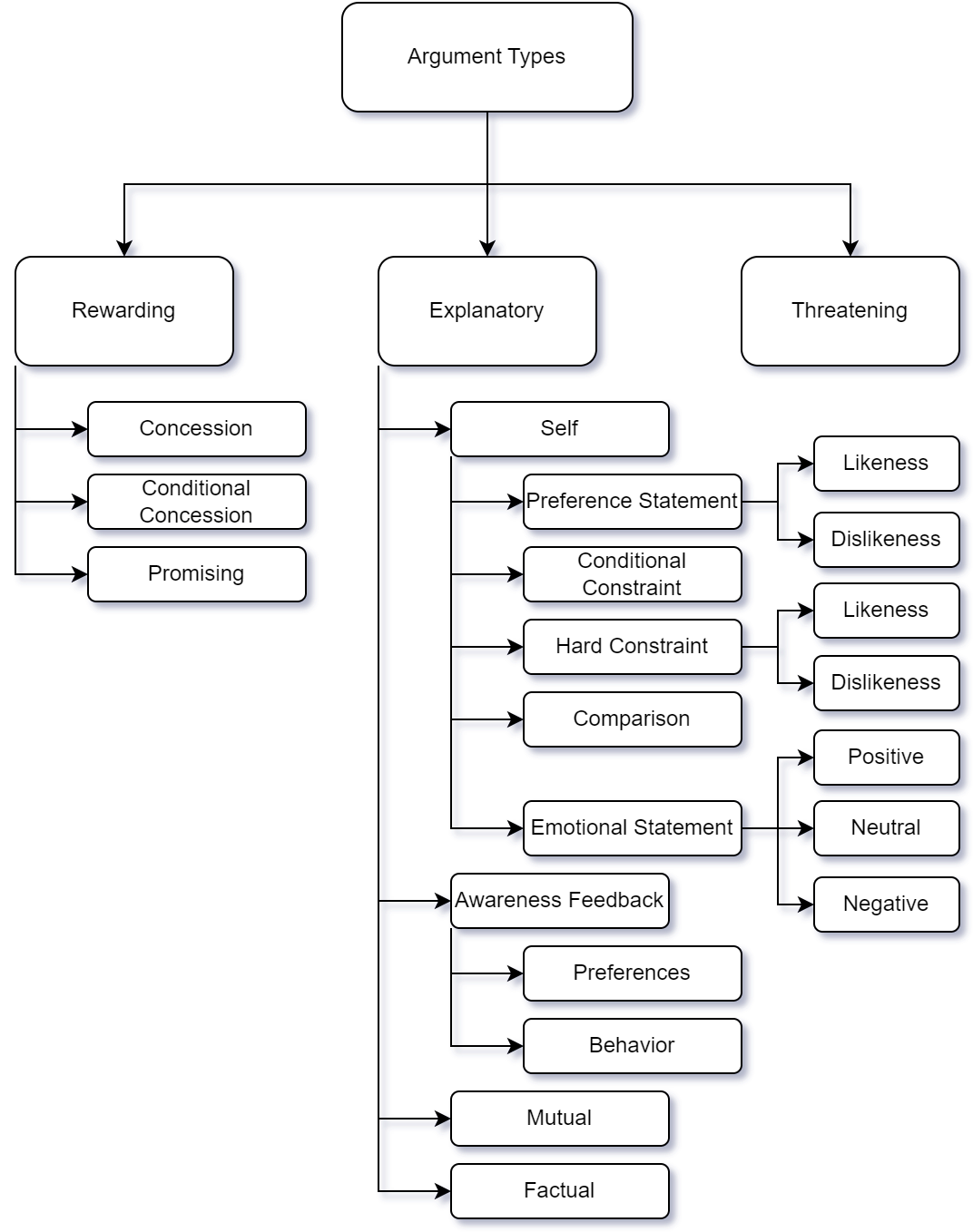
Anıl Doğru, Mehmet Onur Keskin, and Reyhan AydoğanACM Transaction on Interactive Intelligent SystemsMar 2025Autonomous negotiating agents, which can interact with other agents, aim to solve decision-making problems involving participants with conflicting interests. Designing agents capable of negotiating with human partners requires considering some factors, such as emotional states and arguments. For this purpose, we introduce an extended taxonomy of argument types capturing human speech acts during the negotiation. We propose an argument-based automated negotiating agent that can extract human arguments from a chat-based environment using a hierarchical classifier. Consequently, the proposed agent can understand the received arguments and adapt its strategy accordingly while negotiating with its human counterparts. We initially conducted human-agent negotiation experiments to construct a negotiation corpus to train our classifier. According to the experimental results, it is seen that the proposed hierarchical classifier successfully extracted the arguments from the given text. Moreover, we conducted a second experiment where we tested the performance of the designed negotiation strategy considering the human opponent’s arguments and emotions. Our results showed that the proposed agent beats the human negotiator and gains higher utility than the baseline agent.
@article{10.1145/3691643, month = mar, journal = {ACM Transaction on Interactive Intelligent Systems}, pid = {09}, author = {Do\u{g}ru, An\i{}l and Keskin, Mehmet Onur and Aydo\u{g}an, Reyhan}, title = {Taking into Account Opponent’s Arguments in Human-Agent Negotiations}, year = {2025}, issue_date = {March 2025}, publisher = {Association for Computing Machinery}, address = {New York, NY, USA}, volume = {15}, number = {1}, issn = {2160-6455}, url = {https://doi.org/10.1145/3691643}, doi = {10.1145/3691643}, articleno = {2}, numpages = {35}, keywords = {Human-Agent Negotiation, Argumentation, Opponent Modeling} }
2024
- IJCAI 2024
 Mehmet Onur Keskin, Berk Buzcu, Berkecan Koçyiğit, and 3 more authorsIn Proceedings of the 33rd International Joint Conference on Artificial Intelligence (IJCAI), Jeju, KoreaAug 2024
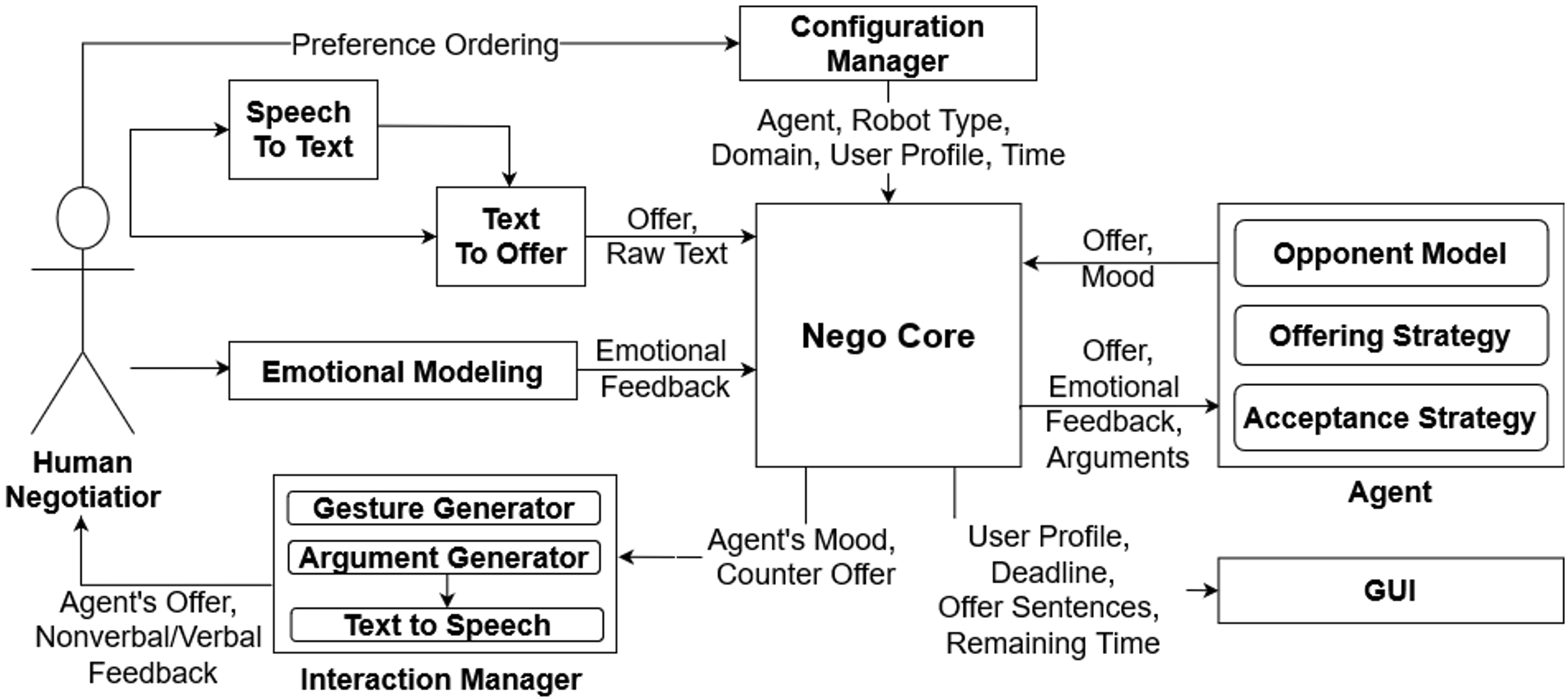
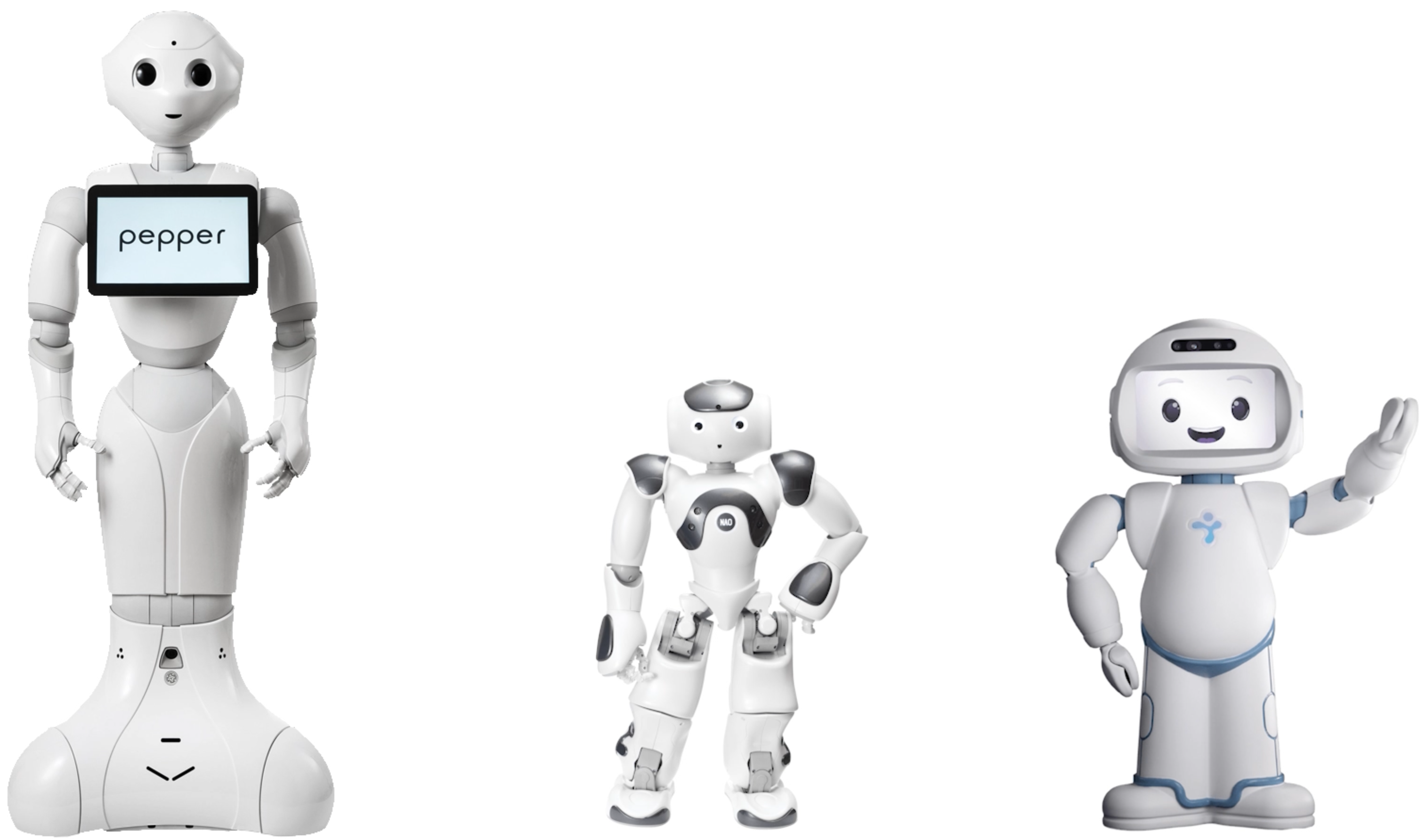
Mehmet Onur Keskin, Berk Buzcu, Berkecan Koçyiğit, and 3 more authorsIn Proceedings of the 33rd International Joint Conference on Artificial Intelligence (IJCAI), Jeju, KoreaAug 2024The paper introduces a comprehensive human-agent negotiation framework designed to facilitate the development and evaluation of research studies on human-agent negotiation without building each component from scratch. Leveraging the interoperability and reusability of its components, this framework offers various functionalities, including speech-to-text conversion, emotion recognition, a repository of negotiation strategies, and an interaction manager capable of managing gestures designed for Nao, Pepper, and QT, and coordinating message exchanges in a turn-taking fashion. This framework aims to lower the entry barrier for researchers in human-agent negotiation by providing a versatile platform that supports a wide range of research directions, including affective computing, natural language processing, decision-making, and non-verbal communication.
@inproceedings{10.24963/ijcai.2024/1012, month = aug, booktitle = {Proceedings of the 33rd International Joint Conference on Artificial Intelligence (IJCAI), Jeju, Korea}, pid = {12}, author = {Keskin, Mehmet Onur and Buzcu, Berk and Ko\c{c}yi\u{g}it, Berkecan and \c{C}akan, Umut and Do\u{g}ru, Anil and Aydo\u{g}an, Reyhan}, title = {NEGOTIATOR: a comprehensive framework for human-agent negotiation integrating preferences, interaction, and emotion}, year = {2024}, isbn = {978-1-956792-04-1}, url = {https://doi.org/10.24963/ijcai.2024/1012}, doi = {10.24963/ijcai.2024/1012}, articleno = {1012}, numpages = {4}, series = {IJCAI '24} } - IJCAI 2024
 Anıl Doğru, Mehmet Onur Keskin, Catholijn M. Jonker, and 2 more authorsIn Proceedings of the 33rd International Joint Conference on Artificial Intelligence (IJCAI), Jeju, KoreaAug 2024
Anıl Doğru, Mehmet Onur Keskin, Catholijn M. Jonker, and 2 more authorsIn Proceedings of the 33rd International Joint Conference on Artificial Intelligence (IJCAI), Jeju, KoreaAug 2024The complexity of automated negotiation research calls for dedicated, user-friendly research frameworks that facilitate advanced analytics, comprehensive loggers, visualization tools, and auto-generated domains and preference profiles. This paper introduces NegoLog, a platform that provides advanced and customizable analysis modules to agent developers for exhaustive performance evaluation. NegoLog introduces an automated scenario and tournament generation tool in its Web-based user interface so that the agent developers can adjust the competitiveness and complexity of the negotiations. One of the key novelties of the NegoLog is an individual assessment of preference estimation models independent of the strategies.
@inproceedings{ijcai2024p998, month = aug, booktitle = {Proceedings of the 33rd International Joint Conference on Artificial Intelligence (IJCAI), Jeju, Korea}, pid = {11}, title = {NegoLog: An Integrated Python-based Automated Negotiation Framework with Enhanced Assessment Components}, author = {Doğru, Anıl and Keskin, Mehmet Onur and Jonker, Catholijn M. and Baarslag, Tim and Aydoğan, Reyhan}, publisher = {International Joint Conferences on Artificial Intelligence Organization}, editor = {Larson, Kate}, pages = {8640--8643}, year = {2024}, doi = {10.24963/ijcai.2024/998}, url = {https://doi.org/10.24963/ijcai.2024/998} } - HRI 2024
 You Look Nice, but I Am Here to Negotiate: The Influence of Robot Appearance on Negotiation DynamicsMehmet Onur Keskin, Selen Akay, Ayse Dogan, and 3 more authorsIn International Conference on Human-Robot Interaction (HRI), Boulder, CO, USAMar 2024
You Look Nice, but I Am Here to Negotiate: The Influence of Robot Appearance on Negotiation DynamicsMehmet Onur Keskin, Selen Akay, Ayse Dogan, and 3 more authorsIn International Conference on Human-Robot Interaction (HRI), Boulder, CO, USAMar 2024This report presents two experimental studies examining whether relatively subtle differences in the appearances of humanoid robots impact (1) the outcomes of human-robot negotiation (i.e., utility scores) and (2) the participant’s attitudes toward their robot negotiation partner. Study I compared Nao and Pepper, and Study II compared Nao and QT in identical negotiation settings. While the appearance of robots influenced the participant’s attitudes toward the robot before and after the negotiation, such differences were not manifested in the utility scores. The consistent utility scores across different robots reassure that minor variations in the visual characteristics of robots do not alter how users negotiate with a robot. Yet, as participants felt differently about the three robots, there remains the possibility that the differences in their appearances may influence the user’s initial inclination to approach each robot. As among the first to systematically investigate the influence of robot appearance on human-robot negotiations, this study emphasizes the importance of assessing both objective outcome scores and the subjective experience of the user in human-robot interaction (HRI) research and offers valuable insights for designing and implementing social robots in real-world settings including customer service and other AI-based interactions.
@inproceedings{10.1145/3610978.3640759, month = mar, booktitle = {International Conference on Human-Robot Interaction (HRI)}, pid = {10}, author = {Keskin, Mehmet Onur and Akay, Selen and Dogan, Ayse and Ko\c{c}yigit, Berkecan and Kanero, Junko and Aydogan, Reyhan}, title = {You Look Nice, but I Am Here to Negotiate: The Influence of Robot Appearance on Negotiation Dynamics}, year = {2024}, isbn = {9798400703232}, publisher = {Association for Computing Machinery}, address = {New York, NY, USA}, url = {https://doi.org/10.1145/3610978.3640759}, doi = {10.1145/3610978.3640759}, pages = {598–602}, numpages = {5}, keywords = {appearance, human-robot negotiation, humanoid robots}, location = {Boulder, CO, USA}, series = {HRI '24} } - JAAMAS 2024
 Mehmet Onur Keskin, Furkan Cantürk, Cihan Eran, and 1 more authorAutonomous Agents and Multi-Agent SystemsMar 2024
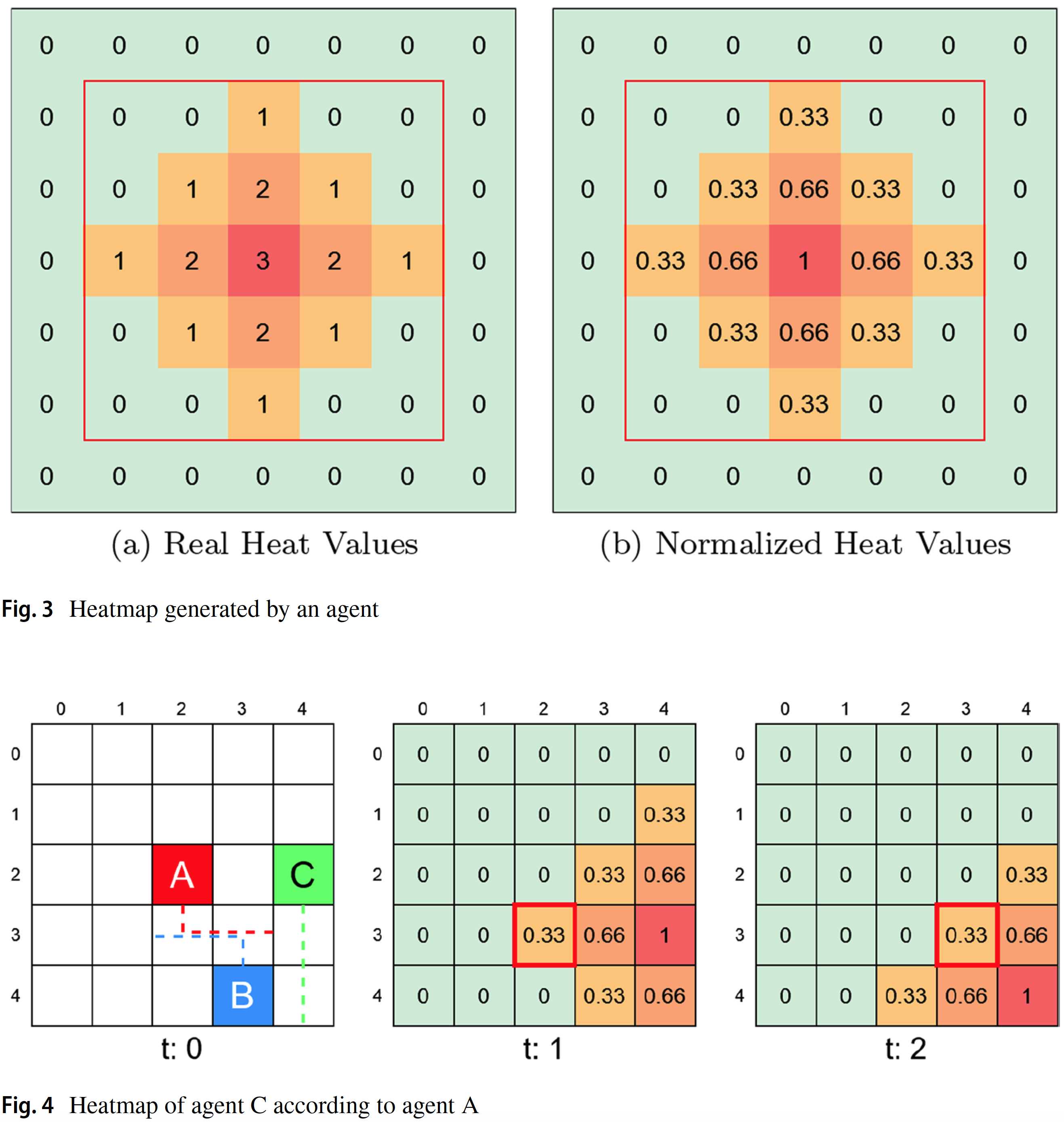
Mehmet Onur Keskin, Furkan Cantürk, Cihan Eran, and 1 more authorAutonomous Agents and Multi-Agent SystemsMar 2024This paper introduces a negotiation framework to solve the Multi-Agent Path Finding (MAPF) Problem for self-interested agents in a decentralized fashion. The framework aims to achieve a good trade-off between the privacy of the agents and the effectiveness of solutions. Accordingly, a token-based bilateral negotiation protocol and two negotiation strategies are presented. The experimental results over four different settings of the MAPF problem show that the proposed approach could find conflict-free path solutions albeit suboptimally, especially when the search space is large and high-density. In contrast, Explicit Estimation Conflict-Based Search (EECBS) struggles to find optimal solutions. Besides, deploying a sophisticated negotiation strategy that utilizes information about local density for generating alternative paths can yield remarkably better solution performance in this negotiation framework.
@article{Keskin2024_MAPF, month = mar, journal = {Autonomous Agents and Multi-Agent Systems}, pid = {08}, author = {Keskin, Mehmet Onur and Cant{\"{u}}rk, Furkan and Eran, Cihan and Aydo{\u{g}}an, Reyhan}, title = {Decentralized multi-agent path finding framework and strategies based on automated negotiation}, year = {2024}, doi = {10.1007/s10458-024-09639-8}, url = {https://doi.org/10.1007/s10458-024-09639-8} }
2023
- IVA 2023
 Umut Çakan, Mehmet Onur Keskin, and Reyhan AydoğanIn 23rd ACM International Conference on Intelligent Virtual Agents (IVA), Würzburg, GermanyDec 2023
Umut Çakan, Mehmet Onur Keskin, and Reyhan AydoğanIn 23rd ACM International Conference on Intelligent Virtual Agents (IVA), Würzburg, GermanyDec 2023Human-agent negotiation has recently attracted researchers’ attention due to its complex nature and potential usage in daily life scenarios. While designing intelligent negotiating agents, they mainly focus on the interaction protocol (i.e., what to exchange and how) and strategy (i.e., how to generate offers and when to accept). Apart from these components, the embodiment may implicitly influence the negotiation process and outcome. The perception of a physically embodied agent might differ from the virtually embodied one; thus, it might influence human negotiators’ decisions and responses. Accordingly, this work empirically studies the effect of physical and virtual embodiment in human-agent negotiations. We designed and conducted experiments where human participants negotiate with a humanoid robot in one setting, whereas they negotiate with a virtually embodied replica of that robot in another setting. The experimental results showed that social welfare was statistically significantly higher when the negotiation was held with a virtually embodied robot rather than a physical robot. Human participants took the negotiation more seriously against physically embodied agents and made more collaborative moves in the virtual setting. Furthermore, their survey responses indicate that participants perceived our robot as more humanlike when it is physically embodied.
@inproceedings{10.1145/3570945.3607362, month = dec, booktitle = {23rd ACM International Conference on Intelligent Virtual Agents (IVA)}, pid = {07}, author = {\c{C}akan, Umut and Keskin, Mehmet Onur and Aydo\u{g}an, Reyhan}, title = {Effects of Agent's Embodiment in Human-Agent Negotiations}, year = {2023}, isbn = {9781450399944}, publisher = {Association for Computing Machinery}, address = {New York, NY, USA}, url = {https://doi.org/10.1145/3570945.3607362}, doi = {10.1145/3570945.3607362}, articleno = {11}, numpages = {8}, keywords = {Embodiment, Human-Agent Negotiation, Human-Robot Interaction}, location = {W\"{u}rzburg, Germany}, series = {IVA '23} } - App Intel 2023
 Mehmet Onur Keskin, Berk Buzcu, and Reyhan AydoğanApplied Intelligence, SpringerNov 2023
Mehmet Onur Keskin, Berk Buzcu, and Reyhan AydoğanApplied Intelligence, SpringerNov 2023Day by day, human-agent negotiation becomes more and more vital to reach a socially beneficial agreement when stakeholders need to make a joint decision together. Developing agents who understand not only human preferences but also attitudes is a significant prerequisite for this kind of interaction. Studies on opponent modeling are predominantly based on automated negotiation and may yield good predictions after exchanging hundreds of offers. However, this is not the case in human-agent negotiation in which the total number of rounds does not usually exceed tens. For this reason, an opponent model technique is needed to extract the maximum information gained with limited interaction. This study presents a conflict-based opponent modeling technique and compares its prediction performance with the well-known approaches in human-agent and automated negotiation experimental settings. According to the results of human-agent studies, the proposed model outpr erforms them despite the diversity of participants’ negotiation behaviors. Besides, the conflict-based opponent model estimates the entire bid space much more successfully than its competitors in automated negotiation sessions when a small portion of the outcome space was explored. This study may contribute to developing agents that can perceive their human counterparts’ preferences and behaviors more accurately, acting cooperatively and reaching an admissible settlement for joint interests.
@article{Keskin2023, month = nov, journal = {Applied Intelligence, Springer}, pid = {06}, author = {Keskin, Mehmet Onur and Buzcu, Berk and Aydo{\u{g}}an, Reyhan}, title = {Conflict-based negotiation strategy for human-agent negotiation}, year = {2023}, day = {03}, issn = {1573-7497}, doi = {10.1007/s10489-023-05001-9}, url = {https://doi.org/10.1007/s10489-023-05001-9} }
2022
- PRIMA 2022
 Gevher Yesevi, Mehmet Onur Keskin, Anıl Doğru, and 1 more authorIn Principles and Practice of Multi-Agent Systems (PRIMA)Nov 2022
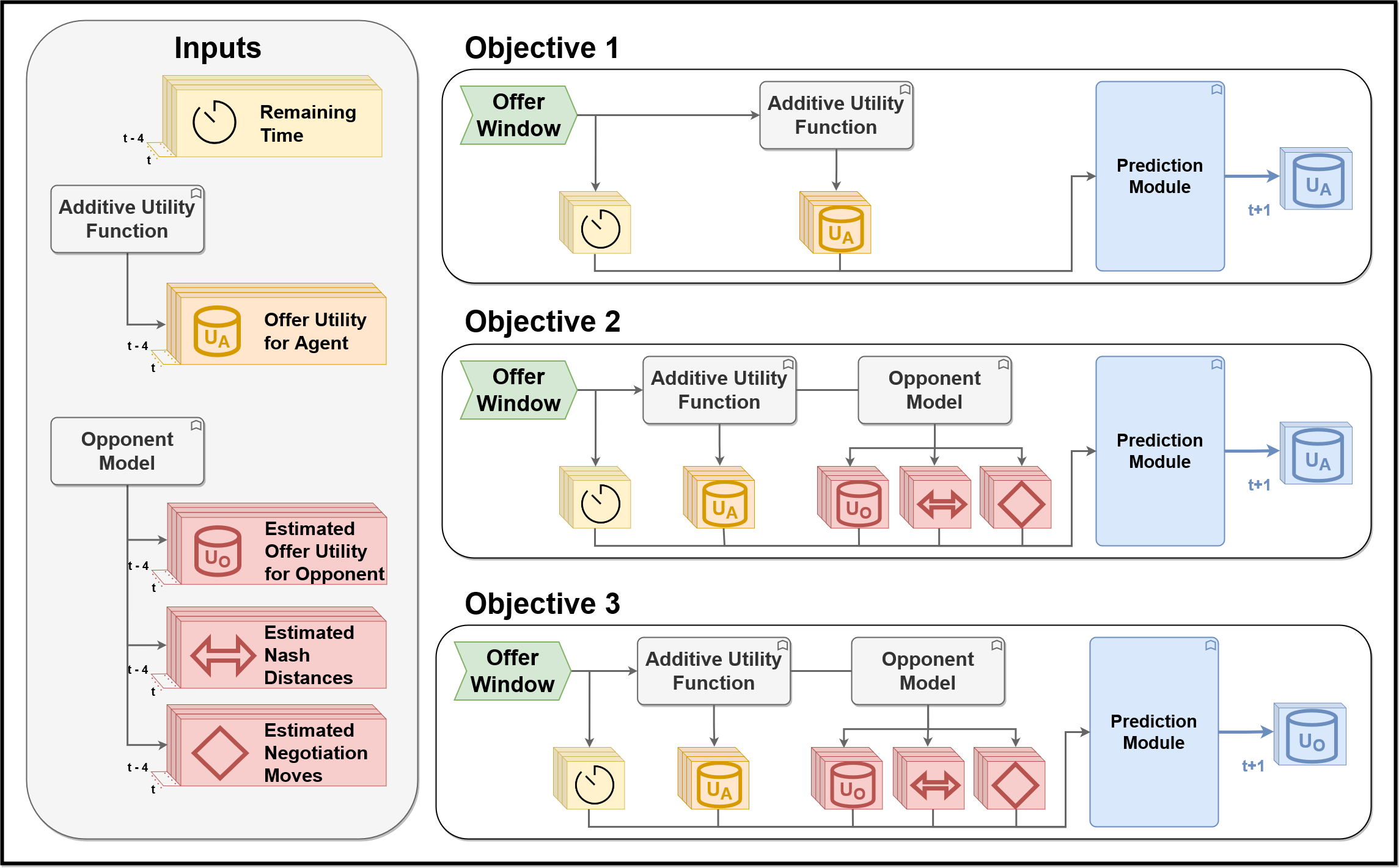
Gevher Yesevi, Mehmet Onur Keskin, Anıl Doğru, and 1 more authorIn Principles and Practice of Multi-Agent Systems (PRIMA)Nov 2022In agent-based negotiations, understanding and predicting an opponent’s bidding patterns is crucial for strategic decision-making. Foreseeing the utility of an opponent’s upcoming offer provides valuable insight for an agent to determine its next move. This paper focuses on predicting an opponent’s future offers using two deep learning approaches: Long Short-Term Memory Networks and Transformers. The learning process has three main targets: 1. Estimating the agent’s utility of the opponent’s coming offer. 2. Estimating the agent’s utility of that offer without using opponent-related variables. 3. Estimating the opponent’s utility of that offer by using opponent-related variables. The work evaluates these models in various negotiation scenarios, and the results show promising prediction performance. The thesis also introduces a novel negotiation strategy called ’Negoformer’, which incorporates these predictions into the offering strategy to enhance negotiation success, demonstrating its effectiveness compared to other agents in metrics like individual utility value and social welfare score.
@inproceedings{inbook, month = nov, booktitle = {Principles and Practice of Multi-Agent Systems (PRIMA)}, pid = {04}, author = {Yesevi, Gevher and Keskin, Mehmet Onur and Doğru, Anıl and Aydogan, Reyhan}, year = {2022}, pages = {381-398}, title = {Time Series Predictive Models for Opponent Behavior Modeling in Bilateral Negotiations}, isbn = {978-3-031-21202-4}, doi = {10.1007/978-3-031-21203-1_23} } - IEEE THMS 2022
 Reyhan Aydoğan, Mehmet Onur Keskin, and Umut ÇakanIEEE Transactions on Human-Machine SystemsFeb 2022
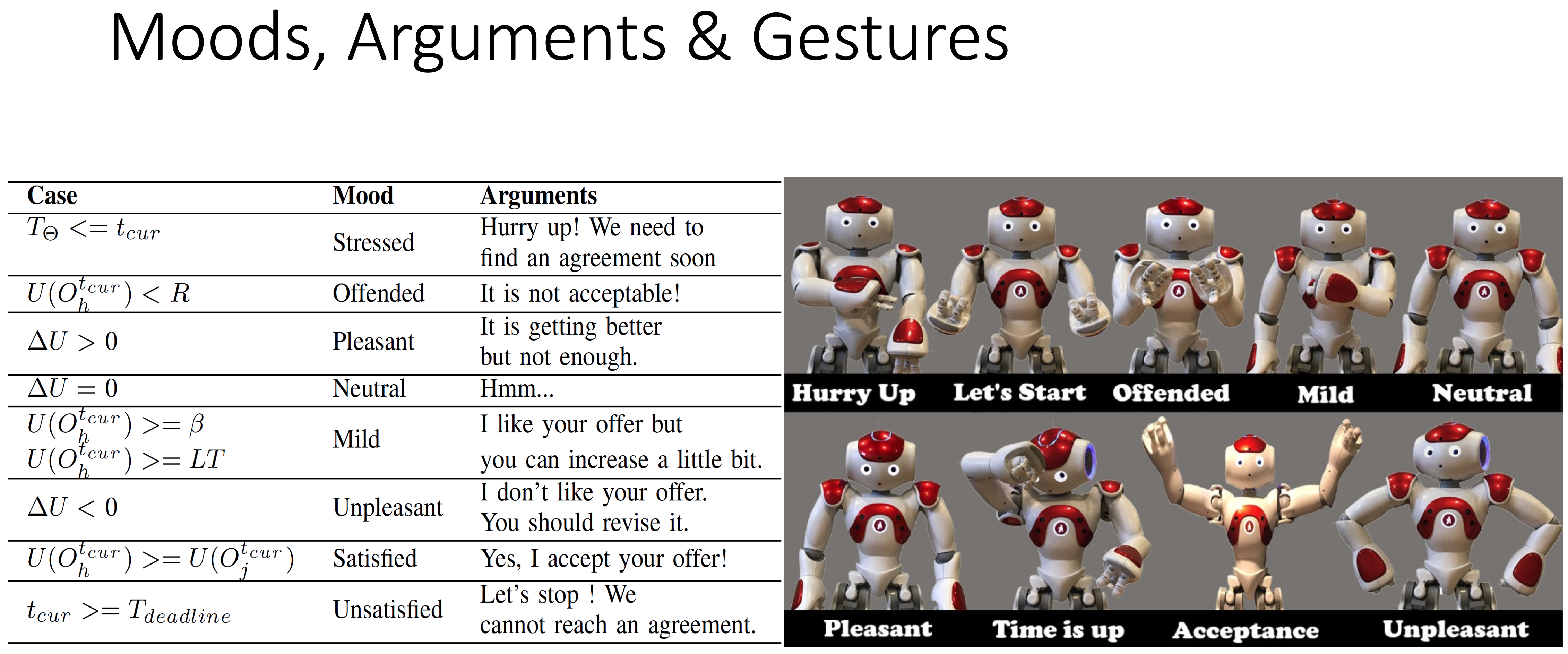
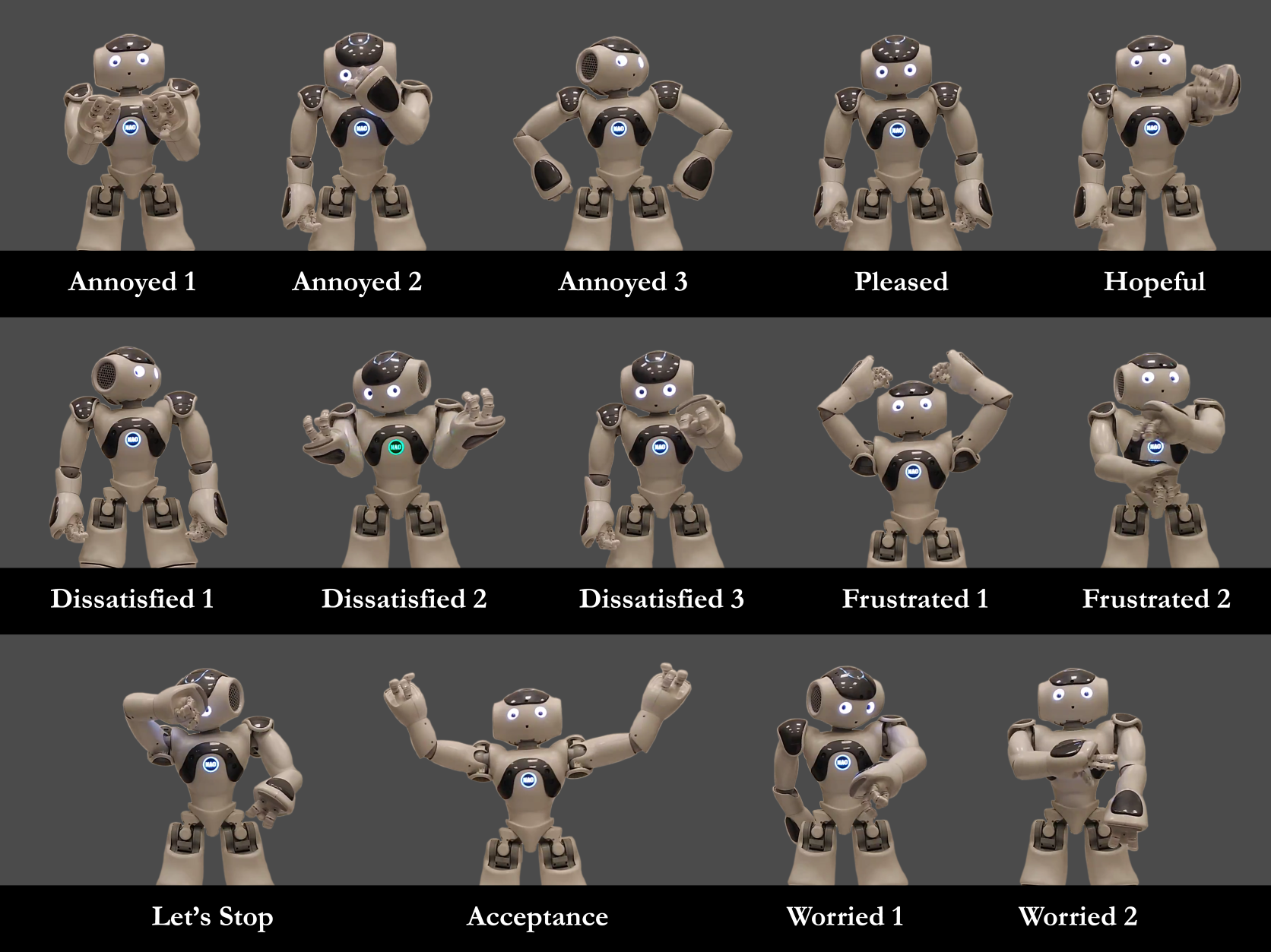
Reyhan Aydoğan, Mehmet Onur Keskin, and Umut ÇakanIEEE Transactions on Human-Machine SystemsFeb 2022With the improvement of intelligent systems and robotics, social robots are becoming part of our society. To accomplish complex tasks, robots and humans may need to collaborate, and when necessary, they need to negotiate with each other. While designing such socially interacting robots, it is crucial to consider human factors such as facial expression, emotions, and body language. Since gestures play a crucial role in interaction, this article studies the effect of gestures in human–robot negotiation experiments. Additionally, it compares the performance of variants of the well-known negotiation tactics (i.e., time-based and behavior-based) in automated negotiation literature in the context of human–robot negotiations. Our experimental results support the finding in automated negotiation. That is, the robot gained higher utility when it imitates its opponent’s bidding strategy than employing a time-based negotiation strategy. When adopting a behavior-based technique, there is a statistically significant effect of gestures on the underlying negotiation process, and, therefore, on negotiation outcome.
@article{9609976, month = feb, journal = {IEEE Transactions on Human-Machine Systems}, pid = {05}, author = {Aydoğan, Reyhan and Keskin, Mehmet Onur and Çakan, Umut}, title = {Would You Imagine Yourself Negotiating With a Robot, Jennifer? Why Not?}, year = {2022}, volume = {52}, number = {1}, pages = {41-51}, doi = {10.1109/THMS.2021.3121664} }
2021
- EUMAS 2021
![A Decentralized Token-based Negotiation Approach for Multi-Agent Path Finding [EUMAS 2021 Second Best Paper].png](/assets/img/publication_preview/A%20Decentralized%20Token-based%20Negotiation%20Approach%20for%20Multi-Agent%20Path%20Finding%20%5BEUMAS%202021%20Second%20Best%20Paper%5D.png) Cihan Eran, Mehmet Onur Keskin, Furkan Cantürk, and 1 more authorIn 18th European Conference on Multi-Agent SystemsJul 2021
Cihan Eran, Mehmet Onur Keskin, Furkan Cantürk, and 1 more authorIn 18th European Conference on Multi-Agent SystemsJul 2021This paper introduces a negotiation approach to solve the Multi-Agent Path Finding problem. The approach aims to achieve a good trade-off between the privacy of the agents and the effectiveness of solutions. Accordingly, a token-based bilateral negotiation protocol and a compatible negotiation strategy are presented. The proposed approach is evaluated in a variety of scenarios by comparing it with state-of-the-art centralized approaches such as Conflict Based Search and its variant. The experimental results showed that the proposed approach can find conflict-free path solutions with a higher success rate, especially when the search space is large and high-density compared to centralized approaches while the gap between path cost differences is reasonably low. The proposed approach enables agents to have their autonomy; thus, it is convenient for MAPF problems involving self-interested agents.
@inproceedings{10.1007/978-3-030-82254-5_16, month = jul, booktitle = {18th European Conference on Multi-Agent Systems}, pid = {03}, author = {Eran, Cihan and Keskin, Mehmet Onur and Cant\"{u}rk, Furkan and Aydo\u{g}an, Reyhan}, title = {A Decentralized Token-Based Negotiation Approach for Multi-Agent Path Finding}, year = {2021}, isbn = {978-3-030-82253-8}, publisher = {Springer-Verlag}, address = {Berlin, Heidelberg}, url = {https://doi.org/10.1007/978-3-030-82254-5_16}, doi = {10.1007/978-3-030-82254-5_16}, pages = {264–280}, numpages = {17}, keywords = {Decentralized coordination, Self-interested agents, Negotiation, Multi-Agent Path Finding} } - AAMAS 2021
 Mehmet Onur Keskin, Umut Çakan, and Reyhan AydoganIn International Conference on Autonomous Agents and Multiagent SystemsJan 2021
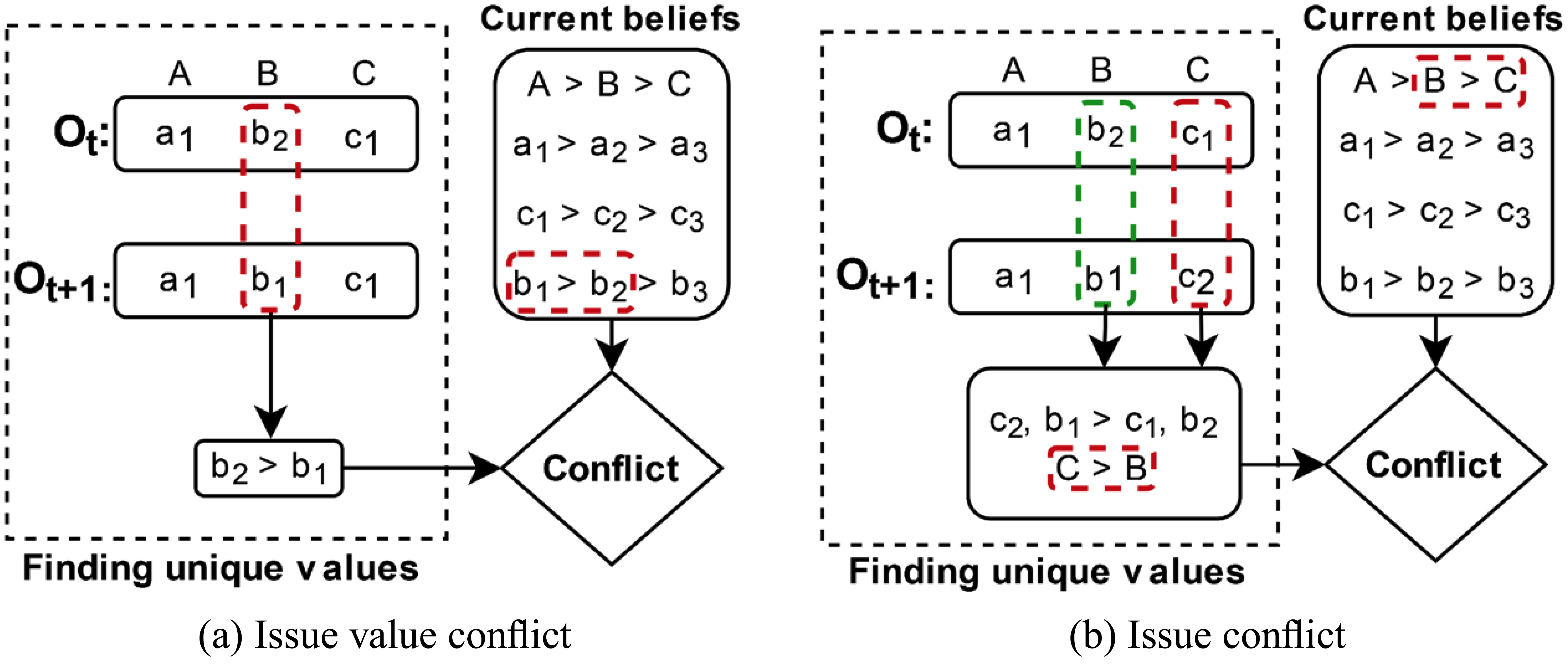
Mehmet Onur Keskin, Umut Çakan, and Reyhan AydoganIn International Conference on Autonomous Agents and Multiagent SystemsJan 2021Negotiation is one of the crucial processes for resolving conflicts between parties. In automated negotiation, agent designers mostly take opponent’s offers and the remaining time into account while designing their strategies. While designing a negotiating agent interacting with a human directly, other information such as opponent’s emotional changes during the negotiation can establish a better interaction and reach an admissible settlement for joint interests. Accordingly, this paper proposes a bidding strategy for humanoid robots, which incorporates their opponents’ emotional states and awareness of the agent’s changing behavior.
@inproceedings{inproceedings, month = jan, booktitle = {International Conference on Autonomous Agents and Multiagent Systems}, doi = {https://dl.acm.org/doi/10.5555/3463952.3464158}, pid = {02}, author = {Keskin, Mehmet Onur and Çakan, Umut and Aydogan, Reyhan}, year = {2021}, pages = {}, title = {Solver Agent: Towards Emotional and Opponent-Aware Agent for Human-Robot Negotiation} } - AAN 2021
 Reyhan Aydoğan, Mehmet Onur Keskin, and Umut ÇakanIn Advances in Automated Negotiations, Studies in Computational IntelligenceJan 2021
Reyhan Aydoğan, Mehmet Onur Keskin, and Umut ÇakanIn Advances in Automated Negotiations, Studies in Computational IntelligenceJan 2021Social robots are increasingly integrated into society, necessitating their interaction with humans to fulfill tasks. Negotiation stands as an essential process for these robots to engage in, enabling joint decision-making with human counterparts when conflicting interests arise. This paper introduces a novel approach for a humanoid robot to negotiate effectively with humans through speech. The research proposes a speech-based negotiation protocol where agents make offers in a turn-taking manner via speech. A variant of a time-based concession bidding strategy is presented for the humanoid robot, and its performance was evaluated against human counterparts in human-robot negotiation experiments. The study aims to investigate the effect of knowing one’s negotiation partner, particularly the familiarity with the opponent, on the negotiation outcome and process. This work contributes a human-agent negotiation framework where a human negotiator interacts with a virtual avatar, exploring how limited familiarity impacts the negotiation.
@inproceedings{10.1007/978-981-15-5869-6_1, month = jan, doi = {10.1007/978-981-15-5869-6_1}, pid = {01}, author = {Aydo{\u{g}}an, Reyhan and Keskin, Mehmet Onur and {\c{C}}akan, Umut}, editor = {Ito, Takayuki and Zhang, Minjie and Aydo{\u{g}}an, Reyhan}, booktitle = {Advances in Automated Negotiations, Studies in Computational Intelligence}, title = {Let's Negotiate with Jennifer! Towards a Speech-Based Human-Robot Negotiation}, year = {2021}, publisher = {Springer Singapore}, address = {Singapore}, pages = {3--16} }